Indledning
Denne vejledning knytter sig til kapitel 3 i Arbejdstilsynets bekendtgørelse nr. 561 af 24. juni 1994 om indretning af tekniske hjælpemidler. Bekendtgørelsen indeholder bl.a. krav om, at tekniske hjælpemidler skal konstrueres og udstyres mv. således, at farer ved hjælpemidlet er imødegået, og at betjening, reparation, rengøring mv. kan ske sikkerheds- og sundhedsmæssigt forsvarligt. I § 27 findes nogle særlige krav til automatisk drevne, styrede eller overvågede tekniske hjælpemidler.
Denne vejledning giver nærmere retningslinjer for, hvorledes nævnte krav kan opfyldes for automatisk styrede maskinanlæg, inklusive industrirobotanlæg.
Vejledningen gælder dog ikke, hvis anlægget omfattes af kapitel 2 i nævnte bekendtgørelse. I så fald finder alene bestemmelserne i dette kapitel samt bekendtgørelsens bilag I anvendelse, og anlægget skal være CE-mærket efter reglerne i bilag III. Afgørende for, om dette er tilfældet, vil normalt være, om anlægget som nyt er leveret til brug efter den 31. december 1994. Er anlægget leveret efter denne dato, vil det normalt være omfattet af kapitel 2.
I At-vejledning B.1.3, Maskiner og maskinanlæg, er nærmere redegjort for anvendelsesområdet for kapitel 3 og kapitel 2 i nævnte bekendtgørelse, og der henvises herom til denne At-vejledning.
Vejledningen omhandler endvidere krav til brugen af omhandlede maskinanlæg i Arbejdstilsynets bekendtgørelse om anvendelse af tekniske hjælpemidler, herunder krav vedrørende opstilling, eftersyn/vedligeholdelse og instruktion.
Arbejdstilsynet kræver, at automatisk styrede maskinanlæg er indrettet og opstillet i overensstemmelse med vejledningen eller på anden lige så forsvarlig måde. Hvor konkrete omstændigheder gør det nødvendigt, kan Arbejdstilsynet dog stille yderligere krav.Hvor der i vejledningen ikke er overensstemmelse med harmoniserede A- og B-standarders tekniske sikkerhedsniveau, kan de harmoniserede standarder anvendes i stedet for vejledningen.Indholdet i At-vejledningen svarer til retningslinjerne i At-anvisningen fra 1995.
1. Område
Denne vejledning gælder for automatisk styrede maskinanlæg, hvor styreenheden indeholder en programmerbar elektroteknisk/elektronisk styring.
Dette indbefatter fx industrirobotter, førerløse truck, CNC-maskiner og andre elstyrede maskinanlæg til bl.a. svejsning, bearbejdning, montering og transport.
Hvis sådanne maskinanlæg er omfattet af kapitel 2 i bekendtgørelse nr. 561 af 24. juni 1994 om indretning at tekniske hjælpemidler, finder vejledningen ikke anvendelse, jf. indledningen.
2. Almene bestemmelser
Automatiske maskinanlæg, herunder de enkelte enheder, skal være således indrettet, at de kan transporteres, installeres, anvendes og vedligeholdes sikkerheds- og sundhedsmæssigt fuldt forsvarligt.
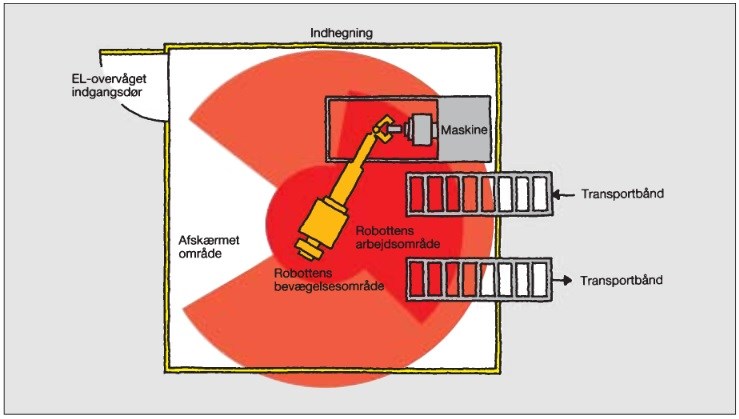
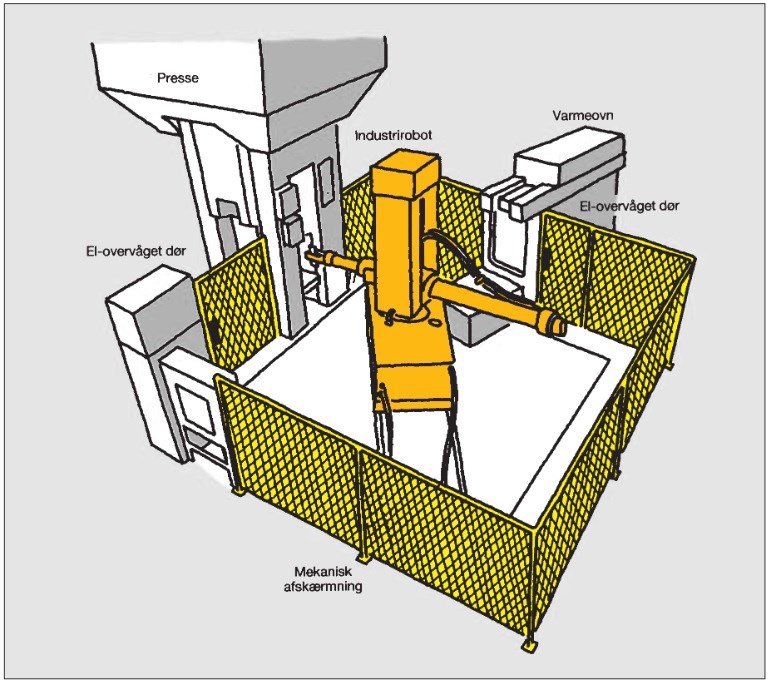
Figur 2 - Indhegnet automatisk maskine. Døren skal være elektrisk overvåget. Bemærk de forskellige områders benævnelser.
Dette krav kan opfyldes ved
- konstruktive foranstaltninger
- anvendelse af sikkerhedsudstyr som indkapslinger og afskærmninger
- andre sikringsformer, som garanterer samme sikkerhedsniveau.
Hver enkelt enhed skal kunne afbrydes på sikker måde.
Nærmere retningslinjer for, hvorledes nævnte krav i almindelighed kan opfyldes for maskiner og maskinanlæg, er givet i At-vejledning om tekniske hjælpemidler – B.1.3. Den gælder også for automatisk styrede maskinanlæg, men herudover skal sådanne maskinanlæg indrettes og anvendes i overensstemmelse med nedenstående pkt. 3 til 7.
Indgår der i et anlæg maskintyper, for hvilke der gælder særlige regler, skal også de følges.
3.1. Styring
3.1.1. Generelle krav
3.1.1.1.
Bortfald samt tilbagekomst af energi må ikke kunne føre til farlig funktion.
3.1.1.2.
Ydre forstyrrelser, fx elektriske og magnetiske felter, lys, temperatur, fugt, lufttryk, støv og forureninger, må ikke kunne påvirke styringens sikkerhedsfunktioner.
3.1.1.3.
Anlægget skal indeholde en indikeringsanordning, som ved farlig fejlfunktion viser, hvor fejlen er opstået.
3.1.1.4.
Styresignal fra en sikkerhedsanordning må ikke kunne påvirkes af styringer fra andre anordninger og skal være overordnet de styresignaler, som fremkommer fra såvel enkelte enheder som fra den styreudrustning, der styrer hele anlægget.
3.1.2. Sikkerhedsstyrekredse
3.1.2.1.
Alle sikkerhedsfunktioner, som har med personsikkerhed at gøre, pkt. 3.1.2.2., skal indgå i en sikkerhedsstyrekreds, som skal være indrettet således, at anlægget i tilfælde af fejl indtager en sikker tilstand.
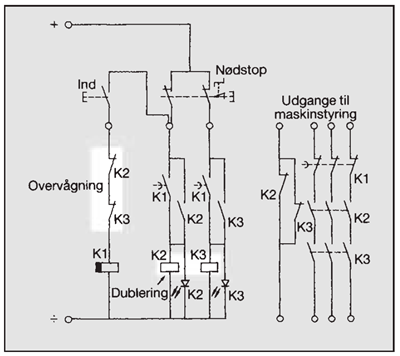
Figur 3.1.2.1. - Eksempel på en styring til et nødstop. Styringen indeholder dublering og overvågning og er indrettet med flere adskilte udgange (to-kanalsystem).
Dette kan fx gøres ved dublering og overvågning af de i sikkerhedsstyrekredsen anvendte komponenter og signalføringer. Dublering betyder her, at hvis en fejl opstår, vil beskyttelsesfunktionen opretholdes af den tilbageværende, ikke fejlramte funktion. Overvågning betyder, at en opstået fejl detekteres og bevirker, at næste arbejdscyklus ikke kan igangsættes. Overvågning af en komponent skal ske lige så ofte, som komponenten arbejder.
Kontaktorer og relæer skal normalt være tvangsførte, dvs. at en sluttekontakt og en brydekontakt aldrig kan være sluttet samtidigt.
Endestopkontakter skal være tvangsbrydende, dvs. at et stopsignal gives via en direkte mekanisk forbindelse til endestopkontaktens brydefunktion.
En maskines, fx en industrirobots, egen styring er også omfattet af kravene om sikkerhedsstyrekredse i de tilfælde, hvor der er tale om personsikkerhed, fx ved stop (afbremsning) af farlige maskinbevægelser.
3.1.2.2.
Sikkerhedsfunktioner, som har med personsikkerhed at gøre, er især
- nødstopudstyr
- stopfunktion som begrænser bevægelsesområdet
- stopfunktion fra ydre beskyttelsesanordninger, fx dørovervågning, lysgitter, lysstråler, kontaktplader, trædemåtter, følelister mv.
- stopfunktion fra holdekontakt, samtykkekontakt mv. - reduceret hastighed og kraft.
3.1.2.3.
Sikkerhedsstyrekredse indeholdende stopfunktioner skal være indrettet efter et af følgende konstruktionsprincipper:
a) Relæstyring.
Overordnet, dubleret og overvåget sikkerhedsstyring i kontaktor/relæteknik, som på sikker måde direkte kan styre de farlige maskinbevægelser, således at den elektroniske styring er fritaget for sikkerhedsansvar.
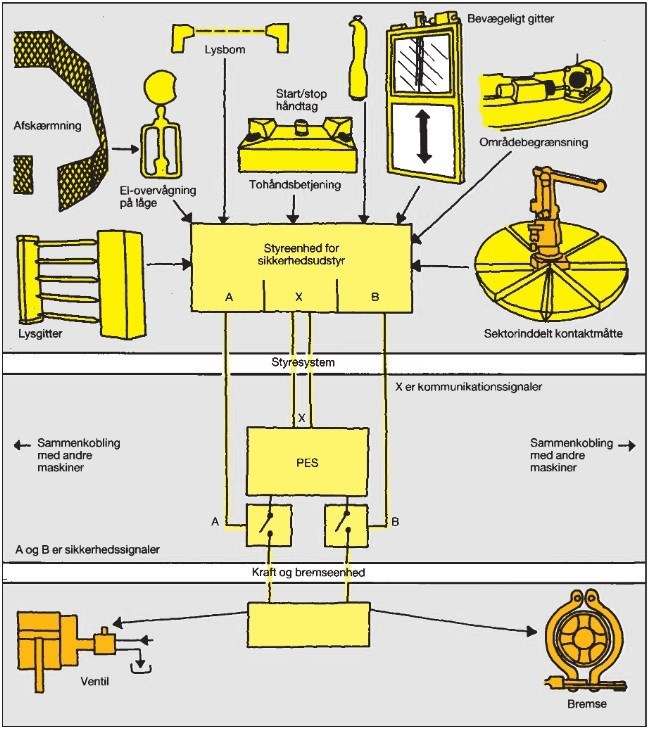
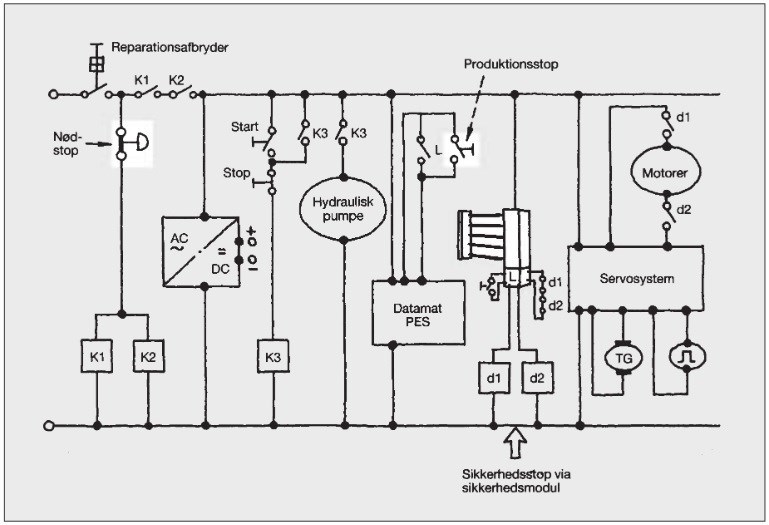
Figur 3.1.2.3.a. Sikkerhedssystemet til automatiske maskinanlæg. Styringen foregår via en programmerbar elektronisk styring (PES), og sikkerheden varetages af en dubleret og overvåget relæstyring (sikkerhedsmodul).
b) Elektronisk styring.
Dubleret elektronisk styring med gensidig fejlsikker overvågning.
Herved skal følgende fejlmuligheder være udelukket:
- At en enkelt fejl (1. fejl) kan medføre personfare
- At en fejl forbliver i systemet og sammen med næste fejl (2. fejl) kan medføre personfare.
Der ses bort fra en samtidig indtræden af to uafhængige fejl.
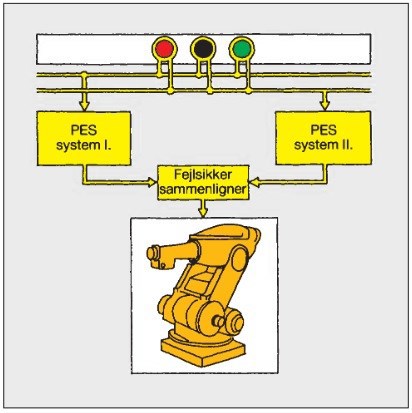
Figur 3.1.2.3.b. Dubleret og overvåget programmerbart elektronisk styresystem (PES), som er indrettet til også at varetage personsikkerheden.
c) Andet.
Andre foranstaltninger som giver den samme sikkerhed.
3.1.2.4.
Sikkerhedsfunktionerne reduceret hastighed og kraft, som bl.a. anvendes ved programmering, skal ved elektroniske styringer være indrettet med:
a) Kontaktomskifter (transformatoromkobling o.l.) eller
b) En kombination af flest mulige enkeltforanstaltninger af software- og hardwareteknisk art, således at samme sikkerhedsniveau som under a) opnås.
Sådanne foranstaltninger kan fx bestå i
- overvågning af hastigheder, accelerationer, elektrisk slip (beregnede og faktiske størrelser)
- computerovervågning (watch-dog)
- hukommelsesovervågning (cyklisk RAM og PROM-check)
- vej- eller vinkelgiverovervågning –målekredsovervågning (ledningsbrud, kortslutning)
- tachogeneratorovervågning
- spændingsovervågning for strømforsyning til computer
- strømovervågning for strømforsyning til computer
- spændingsovervågning for driveffektenheder
- strømovervågning for driveffektenheder
- temperaturovervågning for computer og effektenheder.
3.1.2.5.
Ved hydrauliske og pneumatiske sikkerhedsstyrekredse skal der, ud over hvad der er nævnt i 3.1.2.1., anvendes følgende foranstaltninger for at opnå en sikker tilstand:
- Overvågning af driftstrykket
- Korrekt driftstryk som en startforudsætning
- Igangsætning af hydraulisk og pneumatisk styrede energibevægelser må kun finde sted, når anden nødvendig energiforsyning er etableret
- Efter trykuregelmæssigheder i pneumatisk drevne enheder skal egnede styreelementer bevirke langsom igangsætning
- Hurtigudluftningsventiler på bevægelsescylindre til brug ved nødstop
- Kontraventiler på løftecylindre
- Stopanordninger på alle aksler, som kan bevæges af tyngdekraften
- Andre foranstaltninger, som garanterer en sikker tilstand.
3.1.3. Stopanordninger
Personsikkerhed og produktion skal koordineres for at øge sikkerheden i anlægget. Dette betyder, at de anvendte sikkerhedsfunktioner skal produktionstilpasses, således at produktionen efter et stop kan genstartes på en enkel og sikker måde. Dette er både et produktions- og et sikkerhedskrav, idet en besværlig genstart kan give anledning til omgåelse af sikkerhedsforanstaltningerne.
Et automatisk maskinanlæg skal således indeholde følgende stopmuligheder:
Figur 3.1.3. Principiel indkobling af stopfunktioner i et programmerbart elektronisk styresystem (PES). Principskitse.
3.1.3.1. Produktionstilpasset stop
Et programstop, beregnet til stop af produktionsprocessen i et for arbejdsoperationen naturligt leje, og således at genstart kan ske uden andet indgreb end at give nyt startsignal.
Produktionstilpasset stop skal overgå til sikkerhedsstop, hvis en person går ind i farezonen.
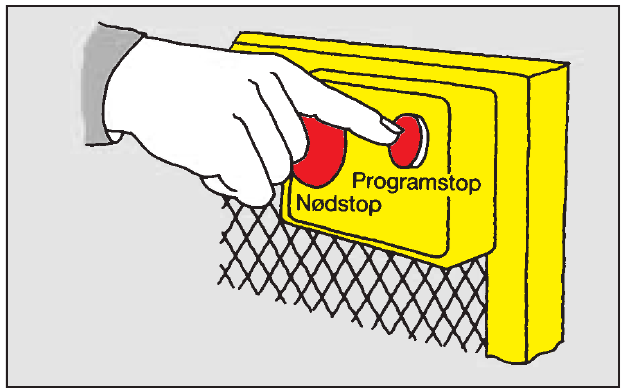
Figur 3.1.3.1. Produktionstilpasset stop. Et programstop som stopper processen i et for operationen passende leje.
3.1.3.2. Sikkerhedsstop
Stopsignal fra sikkerhedsanordning, når operatøren, efter påvirkning af programstoppet, bevæger sig ind i farezonen og derved påvirker lågekontakt, lysgitter, trædemåtte eller andet. Ved genstart kan arbejdet fortsættes fra stoppunktet.
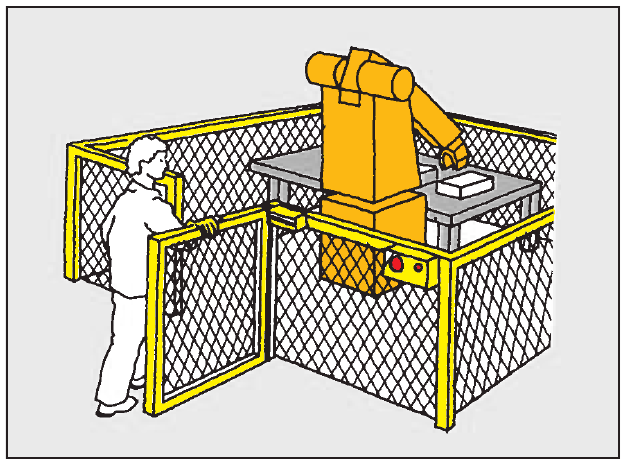
Figur 3.1.3.2. Sikkerhedsstop. Signal fra en sikkerhedsanordning, som bevirker, at maskinen går i sikkert stop, når lågen åbnes. Det betyder, at utilsigtet start af farlig maskinbevægelse er forhindret, uanset en fejl i styringen.
3.1.3.3. Nødstop
Maskinanlæg og enheder heraf skal let, hurtigt og sikkert kunne stoppes med nødstopanordning, hvis ukontrollerede farlige situationer opstår i anlægget. Nødstop skal fungere ved alle driftsmåder, også når en del af anlægget er frakoblet.
Nødstopanordningen skal blive i stopstilling, indtil manuel tilbagestilling foretages.
Nødstopanordninger skal være fast monterede.
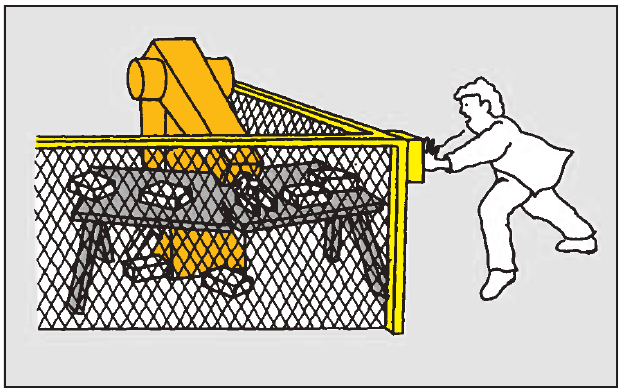
Figur 3.1.3.3. Nødstop. Den tredje stopmulighed. Skal anvendes i farlige situationer. Nødstoppet skal hurtigt og sikkert stoppe alle farlige maskinbevægelser.
3.1.3.4.
Ved sikkerheds- og nødstop skal farlige efterløbsbevægelser standses ved
- bremsning og/ eller
- kontrastyring
- mekanisk spærring
og automatiske fikseringsanordninger (gribere) skal bevare deres holdefunktion.
3.1.4. Omstilling af driftsmetode
Omstilling af driftsmetode må ikke medføre farlig funktion. Ved omstilling skal samtidig den dertil nødvendige beskyttelsesfunktion automatisk indkobles.
Indretning til omstilling af driftsmetode skal være aflåselig og udført således, at det tydeligt fremgår, hvilken driftsform der vælges.
Driftsmetoder er især
- automatik - opstilling, herunder programmering og indstilling
- afprøvning.
3.1.5. Programmeringsenhed
Programmeringsenheder, fx bærbare håndprogrammeringsenheder (HPE), skal
- være ergonomisk korrekt udformet. Håndapparater skal kunne holdes i betjeningsposition med én hånd eller med en holderem
- være forsynet med nødstop
- for bevægelsesfunktioner have holdekontakter, fx joystick, med dødmandskontaktfunktion, som er logisk tilpasset bevægelsesretningerne
- indeholde en holdekontaktanordning (samtykkekontakt), som skal påvirkes samtidig med bevægelsesfunktionskontakten.
Ved anvendelse af programmeringsenhed må farlige bevægelser ikke samtidig kunne igangsættes fra anden kommandoanordning, fx på styreskabet.
3.2. Beskyttelsesanordninger
3.2.1. Generelle krav
Automatiske maskinanlæg skal have en personbeskyttelse, som er tilpasset stoptid og bremselængde for anlægget samt for enheder heraf. Beskyttelsesanordningen skal forhindre, at en person kan komme ind i farezonen, samt at materiale og værktøj kastes ud og derved kan forårsage personskade.
Berøringsfrie beskyttelsesanordninger og trædemåtter giver ingen beskyttelse mod udslyngning af materialer og værktøjer. Specielle anordninger til fastholdelse, fx gribe- og holdeanordninger indrettet med fjedre, kan derfor være nødvendige.
3.2.1.1.
Hvis det ved automatdrift er absolut nødvendigt, at en person befinder sig inde i det område, der er afgrænset af sikkerhedsudstyret, skal der være en beskyttelsesanordning, som automatisk stopper farlig maskinbevægelse, inden personskade opstår. Hvis dette ikke er muligt, skal farlig maskinbevægelse kunne iagttages, og let, hurtigt og sikkert kunne stoppes via en speciel holdekontakt eller anden anordning med samme sikkerhed. Dette kan fx være en trepositionsholdekontakt, som stopper farlig maskinbevægelse, både når kontakten trykkes i bund, og når den slippes.
3.2.2. Genstart
Genstart efter stop fra beskyttelsesanordning må kun kunne ske manuelt med den normale startanordning efter påvirkning af en tilbagestillingskontakt (reset), som skal være placeret således, at den ikke kan nås af en person, der befinder sig i fareområdet.
Hvis beskyttelsesanordningen påvirkes konstant, mens en person befinder sig i fareområdet, kræves ingen speciel tilbagestillingsanordning.
Genstart, efter at driften er stoppet af en beskyttelsesanordning, der også anvendes som betjeningsanordning, må kun ske automatisk, hvis stoppet er en planlagt del af arbejdsprocessen, og hvis beskyttelsesanordningen er påvirket, så længe en person befinder sig i fareområdet.
3.2.3. Mekaniske afspærringsanordninger, fx indhegninger og kabiner
Sikkerhedsafstande, fastgørelse og overvågning skal være i overensstemmelse med Arbejdstilsynets vejledning B.1.3 om maskiner og maskinanlæg. Der skal ved konstruktionen træffes de fornødne foranstaltninger imod faren for, at emner og værktøjer kan slynges ud, samt imod blænding, stråling, vandstrålebearbejdning og støj mv. Ved robotanlæg betyder dette normalt en indhegningshøjde på 1,8 m.
Figur 3.2.3. Mekanisk afskærmet automatisk styret maskine. Dørene skal være elektrisk overvågede. Ved robotanlæg skal indhegningshøjden normalt være 1,8 m, hvis der er fare for fx udslyngning. Mellem gulv og indhegning kan være en friåbning på 0,3 m.
3.2.4. Sikkerhedsudstyr, der reagerer, når en person nærmer sig farezonen
Sådant udstyr, fx berøringsløst udstyr (optisk, elektromagnetisk), trædemåtter, kontaktplader, kontaktlister m.m., skal suppleres med afskærmning o.l., hvis der er fare for, at dele kan slynges ud.
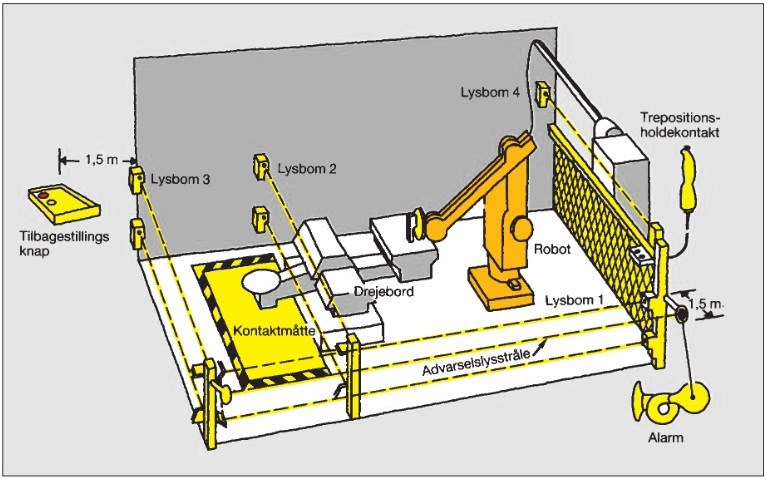
Figur 3.2.4.a. Industrirobot med drejebord indrettet med lysbomme, advarselslysstråle, tilbagestillingsfunktion, kontaktmåtte og trepositionskontakt.
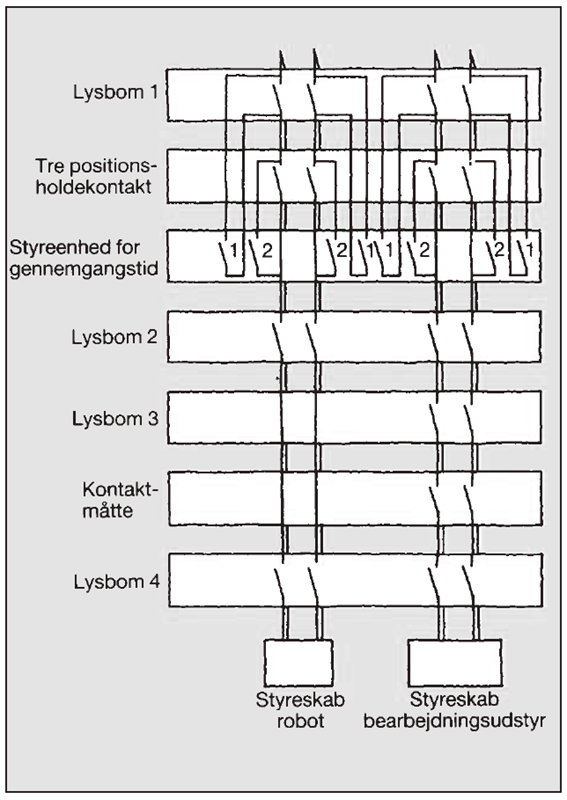
Figur 3.2.4.b. Eksempel på sammenkobling af styreenheder (sikkerhedsmoduler) til sikkerhedsstop på henholdsvis robot og hjælpeudstyr. Kontakt 1 laver en parallelforbindelse over lysbommen i ca. 5 sekunder, mens denne passeres med holdekontakten. Kontakt 2 laver en parallelforbindelse over holdekontakten, når denne er anbragt i sin holder.
3.2.4.1.
Anvendes lysstråler, fotocelleanlæg med enkeltstrålet lyssender og -modtager (lysbom), skal normalt anvendes 2 eller 3 lysstråleanlæg. Ved 2 lysstråleanlæg skal afstandene over gulv være 0,4 m og 1,0 m. Ved 3 lysstråleanlæg skal afstanden være 0,3 m, 0,7 m og 1,1 m over gulv. Sikkerhedsafstanden mellem en lysstråle og en farezone skal normalt være indrettet efter følgende:
S = 850 +v(tm+ t1)
hvor
S = sikkerhedsafstand i mm
v = personens bevægelseshastighed i m/s (normalt 1,6 m/s)
tm= maskinens stoptid i ms
t1= lysstråleanordningens reaktionstid i ms
Stoptiden skal kunne opgives af leverandøren.
3.2.4.2.
Lysgitter (fotocelleværn) skal opfylde gældende bestemmelser.
3.2.4.3. Trædemåtter og kontaktplader
Trædemåtter og kontaktplader skal placeres foran og i fareområdet således, at man ikke kan passere uden om dem eller skræve over dem. Til sikkerhedsafstanden skal tillægges en skridtafstand på 0,6 m.
3.2.5. To-håndsbetjening
To-håndsbetjening skal opfylde gældende bestemmelser.
3.3. Placering af udstyr mv.
3.3.1. Styreskabe
Fordeler- og styreskabe skal så vidt muligt placeres uden for det af sikkerhedsudstyret afgrænsede område. Kan dette ikke teknisk lade sig gøre, skal opstillingsstedet vælges således, at betjenings- og vedligeholdelsespersonalet ikke udsættes for klemningsrisici mellem faststående skabe og bevægelige enheder.
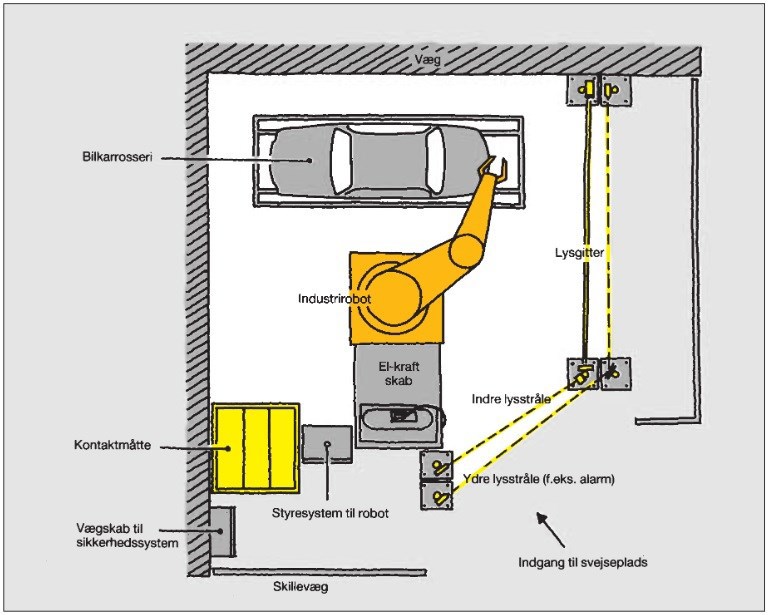
Figur 3.3.1. Robotinstallation sikret med lysgitter, lysbom, advarselslysstråle og kontaktmåtte. De forskellige sikkerhedsanordninger skal placeres i en sikkerhedsafstand fra farezonen, som er afhængig af maskinens stoptid, min. 850 mm. Placering af styreskabe mv. skal foretages således, at der ikke opstår klemningsrisici mellem faste og bevægelige dele.
3.3.2. Startordning
Anordning til opstart af automatisk drift skal være placeret uden for det område, som er sikret ved sikkerhedsudstyr.
3.3.3. Begrænsning af anlæggets bevægelsesområde
Farlige bevægelsesområder, fx ved en industrirobot, skal om nødvendigt begrænses, fx på grund af
- begrænset plads i installationen
- behov for et observationsområde, hvorfra bevægelser i farezonen kan overvåges
- behov for et observationsområde, hvorfra farlige bevægelser kan styres med håndbåret holdekontakt eller programmeringsenhed.
Begrænsninger af bevægelsesområdet kan udføres ved
- mekanisk stop
- tvangspåvirkede endestopkontakter, som indgår i sikkerhedsstyringen.
Observationsområde, som under specielle omstændigheder kan anvendes til brug under afprøvning og overvågning ved arbejdshastighed, skal etableres ved indstillelige stopanslag.
3.4. Tilførsel og udtagning af emner
Tilførsel og udtagning af emner skal, når dette foretages af personer, være indrettet således,
a) at det ikke er muligt at komme i berøring med farlige maskinbevægelser, eller
b) at farlige maskinbevægelser er direkte styret af sikkerhedsstyringen inden for det område, der er adgang til eller kan indgribes i. Styringen skal ske via en sikkerhedsanordning.
Kravene i a og b er fx opfyldt ved anvendelse af adskillende afskærmning/ indhegning i forbindelse med følgende anordninger:
for a)
- drejeborde, tilførselsvogne eller andre mekaniske anordninger, som tilfører eller udtager emner fra farezonen
for b)
- bevægelige, overvågede skærme, låger m.m.
- sikkerhedsudstyr, der virker uden berøring, fx lysgitter, lysbomme mv.
- kontaktplader og trædemåtter
- to-håndsstyresystemer.
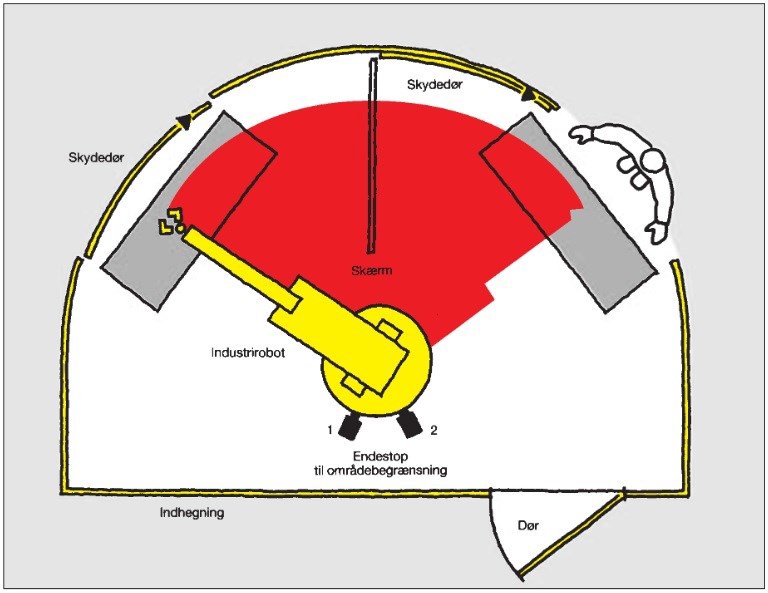
Figur 3.4. Robotinstallation med vekslende arbejdspladser. Dørene er elektrisk overvågede. Skydedøre og de to endestopkontakter (1 og 2) er således indrettet, at robotten stoppes, hvis den forsøger at komme ind i et område med åben skydedør.
4. Drift
4.1. Automatisk drift
4.1.1. Opstartbetingelser
Automatisk drift må først indledes, når
- sikkerhedsudstyrets beskyttende funktion er effektiv
- der ikke opholder sig personer inden for det af sikkerhedsudstyret afgrænsede område.
4.1.2. Fejlfinding, overvågning mv.
Er det absolut nødvendigt, at der, fx i forbindelse med fejlfinding, skal ske en overvågning af arbejdsforløbet under automatisk drift inden for det område, der er afgrænset af sikkerhedsudstyr, er dette kun tilladt, når
- ingen andre tekniske foranstaltninger er mulige
- døre på sikkerhedsafskærmningen altid let kan åbnes udad, samt at
a) personen er bundet til observationsområde (pkt. 3.3.3.) i afskærmet område ved fast monteret sikkerhedsudstyr, eller
b) der til den enkelte person i observationsområde forefindes en transportabel speciel sikkerhedsholdekontakt (trepositionsholdekontakt) med sikkerhedsstop, eller
c) andre lige så sikre foranstaltninger.
4.2. Opstilling
4.2.1. Generelle krav
Indstillings- og programmeringsarbejde skal enten foretages med effektivt sikkerhedsudstyr fra pladser, som ligger uden for det afskærmede område, eller som angivet i pkt. 4.2.2., 4.2.3. eller 4.2.4.
4.2.2. Programmering med HPE
Programmering med håndprogrammeringsenhed (HPE) inden for det af sikkerhedssystemet afgrænsede område kan finde sted, når følgende betingelser er opfyldt:
- De farlige maskinbevægelser må kun kunne styres via holdekontakter med dødmandskontaktfunktion på HPE (fx samtykkekontakt og joystick)
- Hastigheden er reduceret til ca. 250-300 mm/sek.
4.2.3. Testning ved arbejdshastighed
Skal der i undtagelsestilfælde køres testprogrammer ved arbejdshastighed med en person inden for afgrænset område, kan dette foregå fra observationsområde (pkt. 3.3.3.) under følgende betingelser:
- Ophævelse af den reducerede hastighed skal ske ved speciel kontaktanordning
- Anvendelse af trepositionsholdekontakt for hver person.
4.2.4. Programmering uden HPE
Programmering uden håndprogrammeringsenhed, fx ved manuel styring af robotarm eller via erstatningsapparat, kan fx indrettes efter følgende:
- Afbalanceret robotarm
- Reduceret hastighed
- Anvendelse af trepositionsholdekontakt.
4.2.5. Lysmarkering
Ved anvendelse af lysmarkering skal anlæggets øjeblikkelige driftsform markeres med farvet lys efter følgende kode:
- Normaldrift - HVID
- Driftsforstyrrelser/stop - RØD
- Opstilling, reparation, vedligeholdelse - GUL
- Startklar - GRØN.
5. Frigørelse af fastklemt person
Anlægget skal være udført således, at en person, som er fastklemt, kan frigøres hurtigt og sikkert.
Følgende metoder kan anvendes:
- Direkte manuel styring af energistyrede ventiler og drivanordninger
- Omkobling fra automatik til manuel styring
- Anordning, som kan igangsatte en sikker returbevægelse
- Manuel frigørelse af energipåvirkede bremser under forudsætning af, at en vægtafbalancering forefindes.
6. Mærkeplade
Anlægget med enheder skal være mærket med fabrikantens og leverandørens navn og adresse, samt
- type, fabrikationsår, maskinnr.
- energitilslutning
- egenvægt
7. Brugsanvisning
7.1. Fabrikant og importør/leverandør
Ifølge bekendtgørelsen om tekniske hjælpemidlers indretning skal fabrikanten eller importøren/leverandøren af enheder af anlægget medlevere en brugsanvisning med alle sikkerhedsmæssige oplysninger om installation, opstilling, drift og vedligeholdelse.
7.2. Projekterende og installatør
Den, der har projekteret eller installeret anlægget, skal udarbejde en brugsanvisning for det samlede maskinanlæg, som bl.a. giver oplysning om sikker og fagmæssig korrekt drift.
7.3. Indhold
Brugsanvisningen skal være på dansk og bl.a. indeholde forskrifter for
- automatisk drift
- opstilling (programmering, indstilling og afprøvning)
- vedligeholdelse (reparation, rengøring mv.),
samt oplysninger om
- sikkerhedstekniske krav
- farlige driftstilstande, og hvordan disse undgås
- afhjælpning af fejlbehæftede driftstilstande
- hvordan en fastklemt person frigøres
- risici ved montering, afmontering og vedligeholdelse, fx ved akkumulerede energier til vægtudligning, afmontering af bremser mv.
- sikkerhedstekniske indretninger, herunder udformning, tilkobling mv.
- indstilling af begrænsninger for de enkelte aksebevægelser
- regelmæssig kontrol og afprøvning af sikkerhedsudstyr og andre sikkerhedsrelevante dele
- stoptiden for de enkelte maskinenheder, fx industrirobotten
- den nødvendige uddannelse og instruktion for personale, som betjener, programmerer og vedligeholder anlæg eller dele heraf.
Som eksempler på uddannelses- og instruktionskrav for de aktuelle personer kan bl.a. nævnes:
- Hvordan farlige operationer kan undgås
- Hvordan man programmerer, således at fejlagtige funktioner opdages eller fører til stop
- Hvordan en udformning, tilslutning, påvirkning og overvågning af beskyttelsesanordninger foretages, specielt når flere samkørende indretninger er involveret
- Hvordan justering af mekaniske stop med hensyn til operatørens arbejdssituation og bevægelsesområde foretages.
Jens Jensen